Research
We have raised ~$6.7 million CAD to develop intelligent systems that transform how infrastructure and buildings are designed, constructed, and maintained by leveraging AI, robotics, and sensing technologies.
AI-Assisted Design
Generative Structural Design using AI Agents
Structural design involves many repetitive and time-consuming tasks, from understanding project requirements to creating models, running analyses, checking codes, and preparing reports. Agentic AI offers a new way to support this process by enabling AI systems to plan, use software tools, review results, and improve designs step by step. This research explores how agentic AI can help automate parts of structural design while keeping engineers in control. The goal is to support faster, smarter, and more transparent structural engineering workflows.
Construction Informatics
Learning-based Construction Robotics
This research explores how robots can learn to perform construction tasks through human demonstrations, interaction, and feedback. This research focuses on Vision-Language-Action (VLA) models, imitation learning, and reinforcement learning to enable robots to understand task instructions, learn from expert examples, and improve their actions in complex construction environments. By combining perception, reasoning, and autonomous learning, the research aims to develop robotic systems that can adapt to unstructured and changing site conditions. The goal is to improve construction productivity, safety, and human–robot collaboration.
Scan-to-BIM for Timber Rough-In Construction
This research develops an automated pipeline that converts LiDAR point cloud scans of residential construction sites into building information models (BIM). The research focuses on detecting and reconstructing MEP (mechanical, electrical, and plumbing) systems during the rough-in phase — a notoriously difficult environment where thin wires and pipes are frequently hidden behind timber framing. Using a custom-collected dataset of multiple houses and a combination of deep learning-based semantic segmentation and geometry-driven gap interpolation, the pipeline produces connected, BIM-ready MEP representations directly from raw scan data, significantly reducing the manual effort required for construction documentation and as-built modeling.
Low-Cost Handheld LiDAR-Inertial-Visual System for Real-Time 3D Reconstruction of Buildings
In this research, we use a low-cost, handheld scanning device for real-time 3D reconstruction of buildings and their surroundings. The system pairs a compact sensor head — combining LiDAR, an IMU, and an RGB camera — with a backpack-mounted compute unit, and runs a tightly-coupled LiDAR-Inertial-Visual SLAM workflow to produce a dense, RGB-colored point cloud as the operator walks. The workflow supports a seamless indoor-to-outdoor capture workflow, offering a practical alternative to commercial mobile mapping systems for surveying, as-built documentation, and digital-twin applications at a fraction of the cost.
Remote Inspection of Construction Sites using Extended Reality and Robotics
This project develops a remote inspection system that pairs a mobile ground robot with an extended-reality interface, allowing engineers and site managers to walk a construction site without physically being there. A wheeled robot equipped with a 360-degree camera and multiple other sensors navigates the site and streams its surroundings to a remote operator wearing an Extended Reality headset, who experiences the scene in real time and can steer the robot with hand controllers. A computer-vision layer runs on the live feed to detect and label relevant objects (people, equipment, hazards) during the walkthrough, supporting safer, faster, and more accessible site inspections, progress monitoring, and quality control.
Infrastructure Monitoring
AI-based Pavement Condition Assessment
AI-based pavement condition assessment uses computer vision and machine learning to automatically identify and classify different types of pavement defects from roadway images or videos. The system categorizes defects such as cracks, potholes, patching, surface wear, and other visible distresses to support consistent and scalable condition evaluation. By reducing reliance on manual inspection, this approach helps governments and municipalities monitor road networks more efficiently and prioritize maintenance and repair decisions. It provides a practical, data-driven foundation for pavement asset management and long-term infrastructure planning.
Crowdsensing-based Bridge Condition Assessment using Smartphones
This research explores a crowdsensing-based method for bridge condition assessment using vibration data collected from smartphones in vehicles. By analyzing vehicle–bridge interaction signals during normal travel, the study investigates how changes in vibration patterns can be used to identify potential indicators of bridge deterioration or abnormal structural behavior. The research aims to provide a low-cost and scalable method for frequent bridge monitoring without relying on extensive fixed sensor installations. It supports early-stage condition screening, maintenance prioritization, and data-driven bridge asset management.
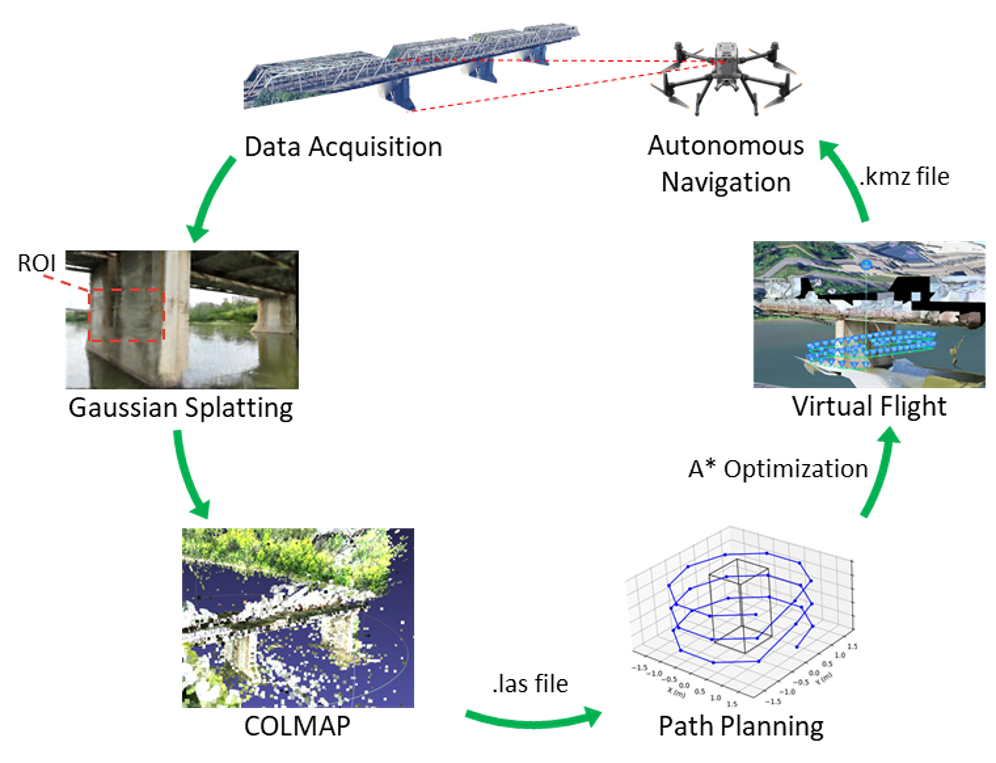
Autonomous Drone Inspection of Bridges
Automated drone inspection of bridges explores the use of autonomous drones, AI, and digital twin technologies to support efficient and accurate bridge condition assessment. This research uses drone-captured images and structure-from-motion (SfM) methods for 3D reconstruction of bridge structures. AI models are developed to measure cracks and track crack propagation over time, enabling more consistent and quantitative defect assessment. The research also investigates autonomous drone navigation and bridge digital twins to improve inspection coverage, data management, and long-term structural monitoring.